

基于機器視覺的LED數碼管光學檢測方案
1 引言
傳統的led生產線上的產品質量控制主要依靠經過訓練過的技師通過目視來實現,由于人眼的主觀性,很難對產品的質量進行精確、穩定地控制。與人眼相比,機器視覺系統具有高速度、精確性、可重復性、長期工作的穩定性。因此將機器視覺技術應用在led的光學檢測上可在很大程度上提高產品質量控制的精度及速度。
2 led數碼管檢測對ccd的要求
待檢產品為七段led數碼管如圖1所示:
(1) 目的
用ccd檢測產品亮度不均勻程度,提高生產效率,減少人為因素。對于“8”字產品(如圖1)就是量測每段(segment)的相對亮度,判斷每段之間的相對亮度差值(指亮度不均勻比率、泄光率是否在合理范圍內,以此來判斷產品是否為良品。同樣地對于點陣產品判斷是每個點)。
(2) 產品條件限制
分兩種情況,一是指極端型產品;另一是指普通型產品:
極端型產品情況:“8”字產品段之間最小間隔(d)0.3mm,段面積a=2×0.6=1.2mm2(如圖2),段最低亮度值0.1mcd;普通型產品情況:“8”字產品段之間最小間隔(d)0.3mm,段面積a=4×0.8=3.2mm2,段最低亮度值0.8mcd。
(3) 判斷亮度差值標準
亮度不均勻比率1:1.3,指每段(或點)之間亮度值比率;
泄光率1:0.2,指點亮段(或點)與不點亮段(或點)亮度值比率。
在(2)、(3)項目條件下,要求ccd最小判斷段數(或點數)應不少于64個,其次,一次測完64段(或點)時間不大于3s。
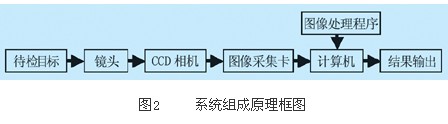
3 硬件方案
硬件系統系統由ccd相機、鏡頭、相機支架、圖像采集卡、遮光罩、計算機、結果輸出單元等組成,如圖2所示。
(1) 相機
本系統相機選用日本jai公司的cv-a1 ccd相機。此相機的主要參數列表如附表。
附表 cv-a1主要性能參數
名稱 參數
象元尺寸 4.65′4.65mm2
有效象元數 1392′1040
最大滿幀輸出 1380′1035
象元時鐘 28.64mhz
行頻 17.127khz(1672/line)
掃描方式 逐行掃描
幀頻 16fps
靈敏度 0.3lux(max gain, 50% video)
信噪比 50db
快門 1/16-1/20000
增益 -0.3-12db(手動)
輸出格式 1vpp/75w
譜段 0.4-1.0mm(黑白)
尺寸 29′44′66mm3
重量 150g
功耗 3w/12v
數量 1臺
對于要檢測的led產品,尺寸為60×40mm,對分辨率為1392×1040的jai相機,按照5%的無效象素的原則,有效成像的分辨率為1300×1000,則系統可以達到的最大象素當量為:
水平方向:60mm/1300pixel≈0.04mm/pixel;
垂直方向:40mm/900pixel ≈0.04mm/pixel。
(2) 鏡頭
選用computar公司百萬象素級1214-mp鏡頭。該款鏡頭是針對高分辨力或高像質需求設計,適用對象為1k′1k至2k′2k的相機,應用于本系統可以獲得很好的圖像清晰度。它的特點是:適用于兆級象素相機的成像;高分辨力超大變倍鏡頭;在整個屏幕范圍內都具有高對比度和高清晰度的圖像;緊湊式設計;低變形率。
由于對工作距離沒有特殊的要求,因而選用12mm的鏡頭就可以保證獲得全幀圖像。
(3) 圖像采集卡
選用coreco公司的pc2-vision,該采集除了能支持cv-ai相機外,還可支持wit8.0軟件。
4 wit視覺軟件介紹
wit是一種公認的功能強大的用于開發和傳遞圖像分析應用的軟件包。wit運用一種叫做“igraph”的框圖結構來描述算法,同時工程人員也通過繪制方框圖表來做出解決方案。在igraph中的每一方框(也稱為一個“operator”)都代表一個功能,通常為一種圖像處理和分析工具。wit提供一種快捷高效的設計環境,它具有完備的operator庫,強大的流控制特性和operator的點擊式重排,它通過mmx優化庫自動在多cpu系統確定執行時間。wit igraph可以在visual basic和visual c++環境中執行,這樣使wit非常適于機器視覺中oem產品的開發,生物制藥,實驗室科學和研究中。
wit處理庫包含300多個處理函數,這些函數都可以從igraph中連接。連接指定一個operator的輸出到另一個operator的輸入。每一個operator的參數都可以很容易的有彈出式對話框來設定。例如:旋轉operator有一個對編程系數進行編輯的核心編輯器。當算法完成后,igaph可以通過點擊按鈕的方式來執行。wit包括一些流控制operator用來執行循環和條件分支等復雜的算法。wit還有一些用來處理數據的operator,支持sub-fields從數據對象中的分離(例如,在一幅圖像中斑點的個數),給數據陣列分類(通過斑點的尺寸進行分類)以及對各操作進行排列(在顯示之前給每一個斑點加標簽)。
為了進一步簡化開發,各種igraph可以嵌套在一起用一個新的圖標來表示。嵌套的igraph和簡單的igraph都可以用同一種模式同一種工具來執行和調試。開發人員可以創建它們自己的圖像處理函數并把它們加入到圖像處理庫中。
wit可以對從采集卡采來的或從磁盤圖像文件中讀取的實時相機數據進行處理。為了最大限度的加強圖像處理和時實操作功能,wit的圖像庫對自動利用多cpu計算機資源進行了優化。另外,wit能夠把operator在分布的處理網絡和嵌入式視覺處理器執行。
wit交互式的框圖界面加速了算法的開發:顯示數據和調整參數更加容易。每一個連結和operator的屬性都可以通過彈出式對話框來修改。wit運用圖像注解來提高可讀性。當執行式圖標會閃爍,傳輸時的紅點表示數據運動。
圖像顯示格式: 用x和y值表示某點;精確顯示像素值;圖像的組控制。
wit可以通過一個稱作ewit的程序在不同的計算機上并行執行或通過pci總線與許多coreco mamba卡進行通信。ewit支持wit的大部分功能,運用圖形應用界面,通過tcp/ip或特殊硬件的特定通道進行通信。因為ewit具有wit的大部分功能,ewit能夠通過運用wit管理器來設置以支持各種采集卡和其他硬件,并把這些服務提供給wit在igraph中執行。
5 軟件設計
(1) 設計原理
在wit中通過動態采集led的圖像后,首先對其進行二值化,以blob算法找出其中每一字段的位置,然后根據這些位置參數讀出每個像素的所有參數。通過求得blob內的所有像素的灰度平均值。
(2) 軟件流程圖(如圖3所示)

(4) wit igraph實現(如圖4所示)

6 測試結果及注意事項
對r、g、b三種不同顏色led進行了測試,實驗結果(如圖5)表明,運行結果能滿足led產品檢測要求。以下幾個問題值得注意:檢測對外部條件要求較高,應在暗室或遮光罩內進行,避免雜光噪音的干擾;電子快門和暴光時間不能過長,應保證視場中最亮部分的灰度值不大于255;相機的自動增益功能須設為off,手動增益設為0;為保證ccd不飽和,可在ccd前加衰減片;電子快門和暴光時間不能過短,應保證視場中最暗部分的灰度值大于二值化閾值。

7 結束語
隨著機器視覺技術的迅速發展,傳統的生產線上的人眼目視檢測將越來越多的被機器視覺系統所取代,構建適合其應用的機器視覺系統,必將在很大程度上提高產品的質量控制以及生產效率。
文章版權歸西部工控xbgk所有,未經許可不得轉載。








 服務咨詢
服務咨詢